OAK PoE设备独立模式详细介绍及使用

POE 设备独立模式
独立运行模式意味着 OAK 相机可以脱离其他计算机自己独立工作,并且可以通过相机端编程来实现和其他设备的自定义数据交互。该模式下工作,需要把 OAK 相机端运行的程序和 NN 模型全部加载到 OAK 相机内置的 Flash 中保存。设备启动后,OAK 相机的主控可以将 Flash 中的程序和 NN 模型加载到 OAK 的闪存中运行。
由于主机和设备之间不会有任何通信,因此首先需要删除所有 XLinkOut 和 XLinkIn 节点。这意味着设备只能通过 Script 节点(网络协议:HTTP/TCP/UDP)与 “外部世界” 通信。
Flash 引导加载程序
Bootloader 与 depthai 打包在一起,因此如果您有最新的 depthai 版本,您可以闪存最新的 Bootloader 版本。要 Flash 引导加载程序,使用 python poe_standalone/standalone.py flash_bootloader 或 poe_standalone flash_bootloader 。
要查看其背后的 API 代码,请参见FlashBootloader示例代码。
Flash 管道
已经在设备上Flash 引导加载程序之后,可以将管道连同它的资产 (NN 模型) 一起 Flash 到 OAK 的闪存:python poe_standalone/standalone.py -P <pipeline> flash_pipeline 或 poe_standalone -P <pipeline>flash_pipeline
代码参考
import depthai as dai
pipeline = dai.Pipeline()
# Define standalone pipeline; add nodes and link them
# cam = pipeline.create(dai.node.ColorCamera)
# script = pipeline.create(dai.node.Script)
# ...
# Flash the pipeline
(f, bl) = dai.DeviceBootloader.getFirstAvailableDevice()
bootloader = dai.DeviceBootloader(bl)
progress = lambda p: print(f'\rFlashing progress: {p:.2%}')
bootloader.flash(progress, pipeline)
成功 Flash 管道后,当您启动设备时,它将自动启动。如果要更改管道,只需再次重新 Flash。
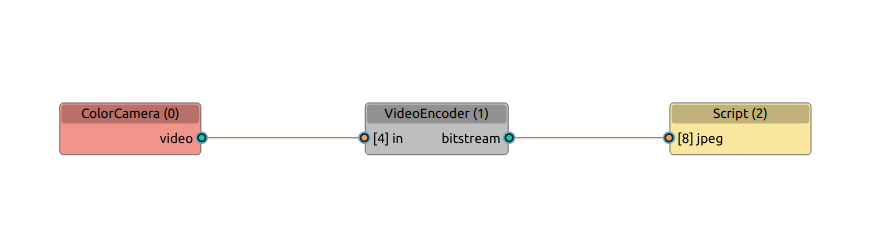
管道可视化
- simple_pipeline
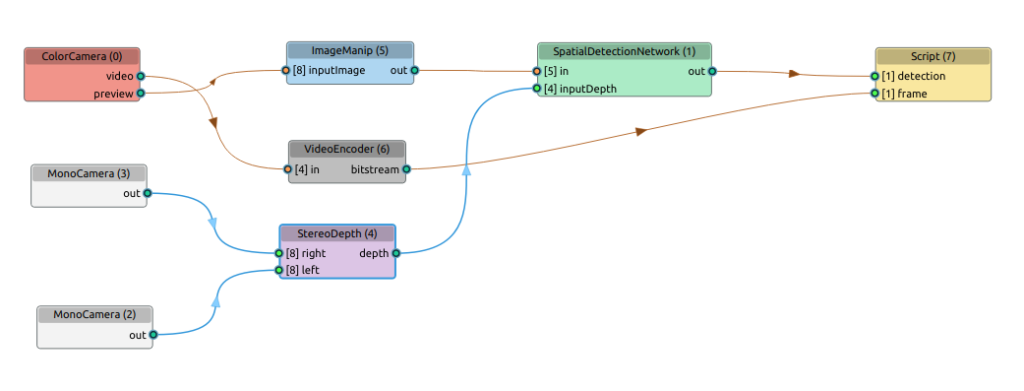
- yolo_stereo_decoding
代码示例
github 仓库:OAK-POE Standalone
安装(可选)
pip install -e .或者
pip install .使用帮助
python poe_standalone/standalone.py -h 或 poe_standalone -h
Usage: standalone.py [OPTIONS] COMMAND [ARGS]...
OAK POE STANDALONE SCRIPTS
╭─ Options ────────────────────────────────────────────────────────────────────╮
│ --device_ip -device_ip IP ADDRESS The IP of the OAK │
│ device you want to │
│ connect to. The │
│ default is to list all │
│ for you to choose │
│ from. │
│ --host_ip -host_ip IP ADDRESS The IP of the Host pc │
│ you want to connect │
│ to. │
│ [default: 192.168.0.1] │
│ --pipeline -P [script_http_server|s Pipeline you want to │
│ cript_mjpeg_server|tc start. │
│ p_streaming_server|tc [default: │
│ p_streaming_server_co script_http_server] │
│ nfig_focus|tcp_stream │
│ ing_client|yolo_decod │
│ ing|yolo_stereo_decod │
│ ing|custom_pipeline] │
│ --custom_pipeline -cp FILE PATH The custom pipeline │
│ you want to start. │
│ --port -p INTEGER NETWORK PORT │
│ [default: 5000] │
│ --blob_path -b FILE PATH YOLO Blob path to use │
│ --config_path -c FILE PATH YOLO Config path to │
│ use │
│ --help -h Show this message and │
│ exit. │
╰──────────────────────────────────────────────────────────────────────────────╯
╭─ Commands ───────────────────────────────────────────────────────────────────╮
│ clear_pipeline Clear the flashed app on the device │
│ flash_bootloader Flash the bootloader to the device │
│ flash_pipeline Flash the pipeline to the device │
│ run Run the program in host mode │
│ save_pipeline Saves application package to a file which can be flashed │
│ to depthai device. │
│ set_ip Sets IP of the POE device │
╰──────────────────────────────────────────────────────────────────────────────╯
示例管道
管道启动:
python poe_standalone/standalone.py -P script_mjpeg_server [flash_pipeline]
或
poe_standalone -P script_mjpeg_server [flash_pipeline]
- script_http_server – 通过 HTTP 响应提供静止图像 参考
- script_mjpeg_server – 通过 HTTP 响应提供 MJPEG 视频流 参考
- tcp_streaming_server – 通过 TCP 协议使用 OAK PoE 流式传输帧(和其他数据)(作为服务器)参考
- tcp_streaming_server_config_focus – 与 tcp_streaming_server 类似,仅添加了从主机通过
.和,键配置 OAK PoE 焦点的选项。参考 - tcp_streaming_client – 通过 TCP 协议使用 OAK PoE 流式传输帧(和其他数据)(作为客户端)参考
- yolo_decoding – 通过 TCP 协议使用 OAK PoE 流式传输 yolo 检测结果,
其中包含标签、置信度和边界框信息 (xmin、 ymin、 xmax、ymax) - yolo_stereo_decoding – 与 yolo_decoding 类似,还包括检测到的对象的 XYZ 坐标。
- custom_pipeline – 自定义管道参考代码
主机端测试程序
启动:
python poe_host/tcp_streaming_server_host.py
或
tcp_streaming_server_host
自定义管道参考代码
#!/usr/bin/env python3
# coding=utf-8
import time
import depthai as dai
from loguru import logger
from string import Template
try:
from poe_standalone.utils import getDeviceInfo
except ImportError:
from utils import getDeviceInfo
def create_pipeline(port=5000, blob_path=None, config_path=None, host_ip=None):
# 开始定义管道
pipeline = dai.Pipeline()
# 定义源 - 彩色相机
cam = pipeline.create(dai.node.ColorCamera)
# 视频编码器
jpeg = pipeline.create(dai.node.VideoEncoder)
jpeg.setDefaultProfilePreset(cam.getFps(), dai.VideoEncoderProperties.Profile.MJPEG)
# 脚本节点
script = pipeline.create(dai.node.Script)
script.setProcessor(dai.ProcessorType.LEON_CSS)
scrpt_str = Template("""
from http.server import BaseHTTPRequestHandler
import socketserver
import socket
import fcntl
import struct
PORT = ${_PORT}
ctrl = CameraControl()
ctrl.setCaptureStill(True)
def get_ip_address(ifname):
s = socket.socket(socket.AF_INET, socket.SOCK_DGRAM)
return socket.inet_ntoa(fcntl.ioctl(
s.fileno(),
-1071617759, # SIOCGIFADDR
struct.pack('256s', ifname[:15].encode())
)[20:24])
class HTTPHandler(BaseHTTPRequestHandler):
def do_GET(self):
if self.path == '/':
self.send_response(200)
self.end_headers()
self.wfile.write(b'<h1>[DepthAI] Hello, world!</h1><p>Click <a href="img">here</a> for an image</p>')
elif self.path == '/img':
node.io['out'].send(ctrl)
jpegImage = node.io['jpeg'].get()
self.send_response(200)
self.send_header('Content-Type', 'image/jpeg')
self.send_header('Content-Length', str(len(jpegImage.getData())))
self.end_headers()
self.wfile.write(jpegImage.getData())
else:
self.send_response(404)
self.end_headers()
self.wfile.write(b'Url not found...')
with socketserver.TCPServer(("", PORT), HTTPHandler) as httpd:
node.warn(f"Serving at {get_ip_address('re0')}:{PORT}")
httpd.serve_forever()
""")
script.setScript(
scrpt_str.safe_substitute(_PORT=port)
)
# 连接
cam.still.link(jpeg.input)
script.outputs["out"].link(cam.inputControl)
jpeg.bitstream.link(script.inputs["jpeg"])
return pipeline
if __name__ == "__main__":
with logger.catch():
# Connect to device with pipeline
device_info = getDeviceInfo()
with dai.Device(create_pipeline(port=5000, blob_path=None, config_path=None, host_ip=None),
device_info) as device:
print(f"\t>>> Name: {device_info.name}")
print(f"\t>>> MXID: {device.getMxId()}")
print(f"\t>>> Cameras: {[c.name for c in device.getConnectedCameras()]}")
print(f"\t>>> USB speed: {device.getUsbSpeed().name}")
while not device.isClosed():
time.sleep(1)