双目、结构光、tof,三种深度相机的原理区别看这一篇就够了!

深度相机也被称为3D相机,它和普通2D相机的区别在于可以获取物体到相机的距离信息,加之2D平面的X,Y坐标,可计算出每个点的三维坐标,以此我们可推断深度相机的应用,如三维重建、目标定位、导航避障等。
效果参考这个视频 :
目前常见的深度相机,他们用的技术可以分为三类:
- 双目
- 结构光
- ToF
▌一、双目
0.基本原理
通过左右两个摄像头同时拍摄同一物体,然后利用计算机算法计算两个摄像头之间的视差,从而得出物体的深度信息。
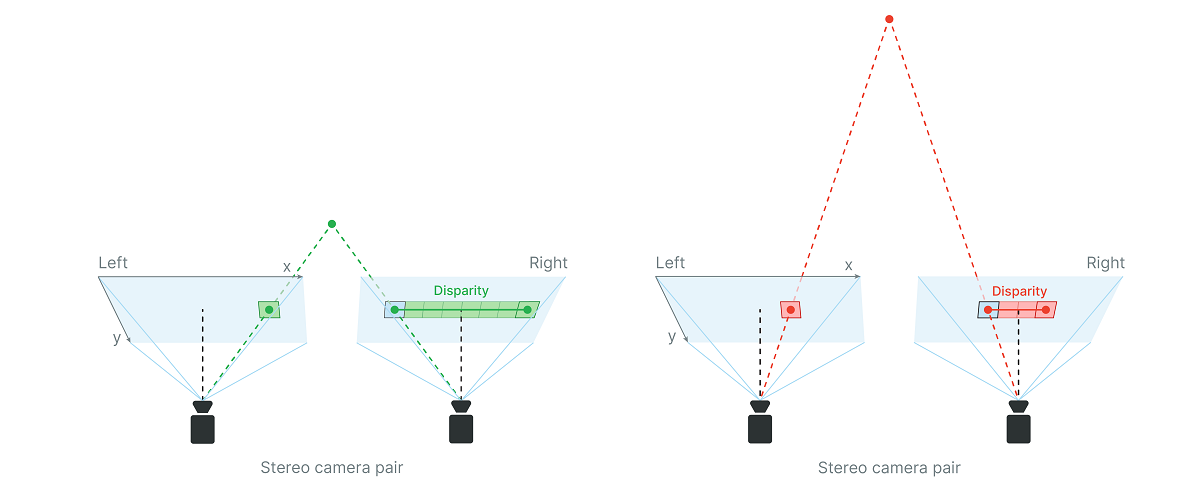
视差是指两个摄像头拍摄同一物体时,物体在两个图像中的位置差异。计算机通过测量这个差异来确定物体离相机的距离。视差类似人的双眼,你单独睁开左、右眼,与同时睁开双眼观看物体的位置、远近是不一样的。
双目相机不主动对外发射光源,因此称为被动深度相机。



1.优点
不需要结构光、TOF的发射器和接收器,因此结构简单硬件成本低,适合成本敏感的应用场景。因为依靠自然光,可在室内外使用。
2.缺点
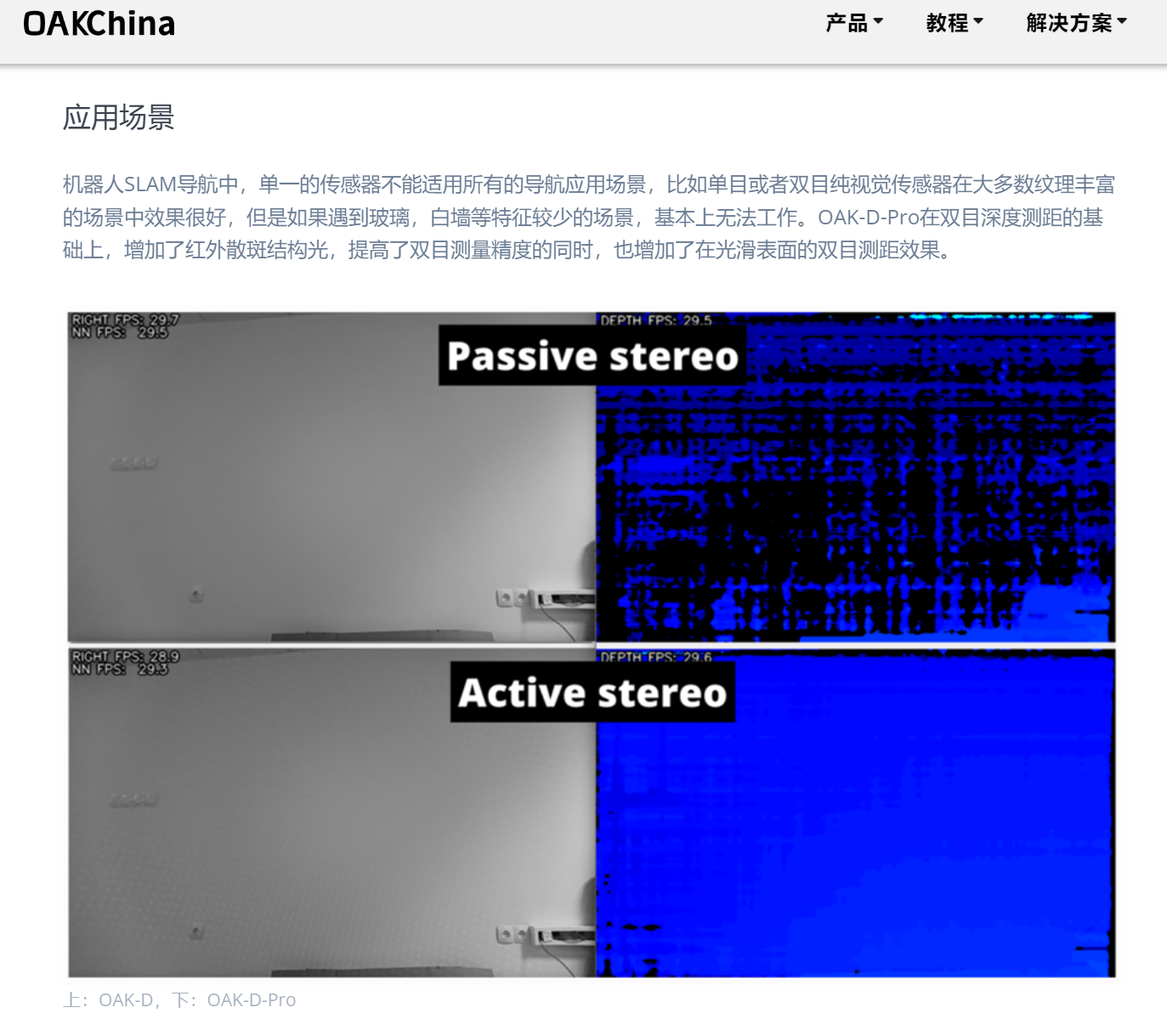
强光、暗光影响较大,因为依赖于自然光。对无纹理的物体或表面影响较大,如纯色墙,因双目相机依据视觉特征进行图像匹配,单一问题会引起匹配失效。
3.应用场景
包括机器人导航、人脸识别、手势识别等。参考OAK相机的部分应用场景:
▌二、结构光
0.基本原理
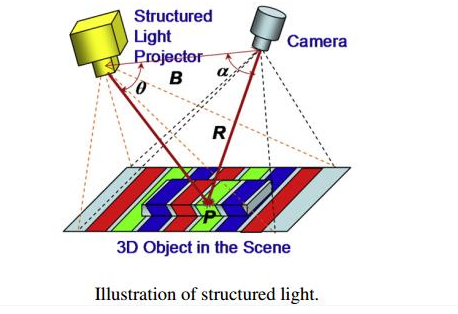
主要硬件有投射仪、相机,通过投射仪主动发射(因此称为主动测量)一束光源(通常是红外线激光)来照亮物体表面,并通过相机镜头来捕捉反射回来的光线。




在这个过程中,光线经过一个光学元件(例如衍射光栅或投射仪),以形成一个结构化的光斑(例如条纹或格子)。
当这个结构化光斑照射到物体表面时,它会产生形变,导致反射回相机的光斑也发生了畸变。通过分析这种畸变的形状和大小,深度相机可以计算出物体表面上每个像素点的深度信息,从而生成一张深度图。
1.优点
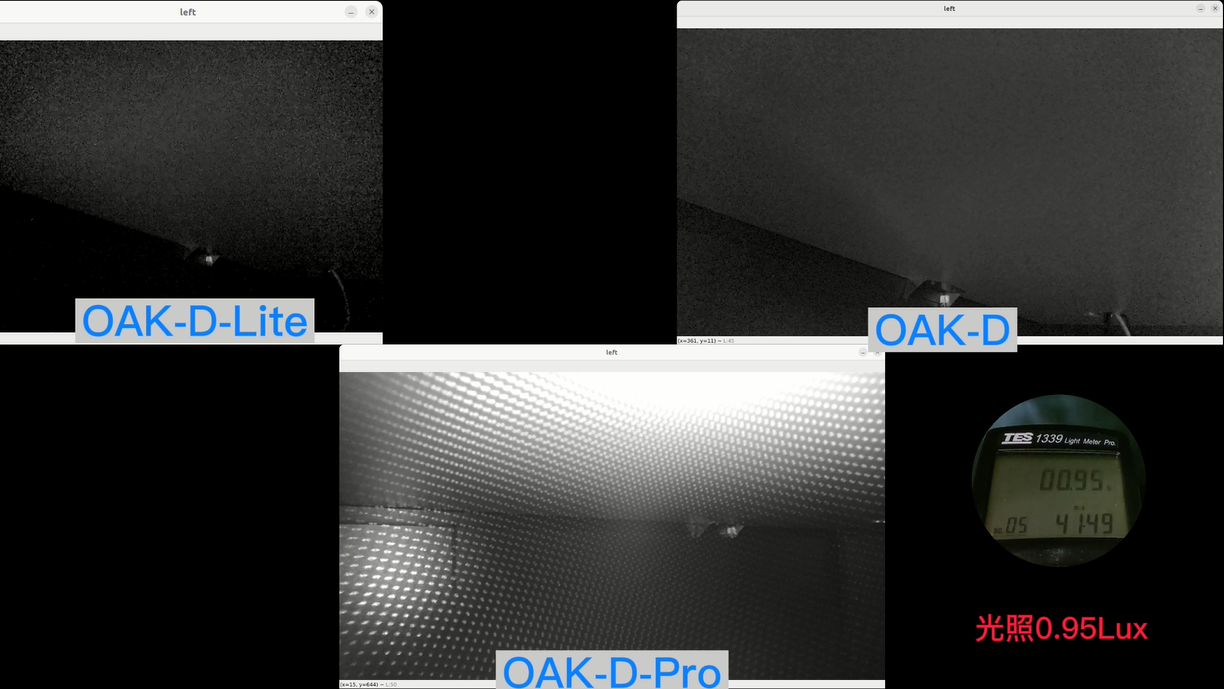
近距离(1米内)精度较高,毫米级。测量范围广、对光线和颜色的敏感度低等。主动投影,适合弱光照使用。
2.缺点
测量距离和分辨率存在一定的局限性。远距离精度差,随着距离的拉长,精度也随之变差。对环境光的干扰较大,室外强光照不宜使用,强光容易干扰投影光。
3.应用场景
包括3D扫描、机器视觉、机器人导航等。参考OAK相机的部分应用场景:
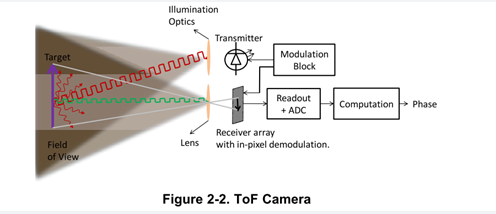
▌三、ToF
0.基本原理
相机通过发送一束光到目标物体上,这个光的波长通常为红外线。当这束光被目标物体反射回来时,相机的光电二极管(PD)阵列接收反射光,并测量光的时间飞行(ToF)。基于ToF的测量技术可以计算光从相机到物体然后返回相机的时间,从而确定物体的距离。
因其主动发射脉冲光,也属于主动测量方式。

1.优点
因为是依靠投射自身光线的技术,所以它不需要任何外部光源来扫描周围环境,即使在光线很少或没有光线的情况下也能正常工作。TOF的测量距离较远,不受表面灰度和特征影响,达百米,可用于无人驾驶
深度距离计算,不会随距离的变化而变化,稳定在厘米级
不像双目相机、结构光需要经过算法处理才能输出三维数据,TOF可以直接输出被测物体三维数据
2.缺点
对环境的光强和干扰比较敏感,室外强光照基本不能使用。由于基于飞行时间的技术依赖于发射和接收自身光的反向反射,因此在自然环境中(例如暴露在阳光下)它们可能表现不佳,这是因为其他光源发出的波会干扰相机设备发出的光。类似地,还有其他因素使ToF传感器更难正常工作,如“反光”表面(在不同方向反射光)或角落(产生多次反射)等。
3.应用场景
客流统计、无人零售、虚拟现实、机器人导航等领域。参考OAK相机的部分应用场景:
▌四、总结
| 类别 | 双目 | 结构光 | ToF |
|---|---|---|---|
| 软件复杂度 | 高 | 中等 | 低 |
| 成本 | 低 | 高 | 中 |
| 精度 | 低 | 高 | 中 |
| 低光下性能 | 差 | 好 | 好 |
| 测距方式 | 被动式 | 主动式 | 主动式 |
| 户外强光下工作 | 无影响 | 有影响 | 有影响 |
▌五、参考内容
结构光和TOF原理及优缺点对比说明 – Sanny.Liu-CV&&ML – 博客园
3D成像方法 汇总(原理解析)— 双目视觉、激光三角、结构光、ToF、光场、全息
▌六、特别说明
罗列的部分应用场景视频来自我们的用户,项目实际所用相机可能不是属于结构光或tof类的深度相机,但因为我们的产品具有兼容性,所以同一项目用不同种类的OAK相机均可正常使用!