OAK深度相机主机时钟同步提升10倍!
给大家分享一个好消息,近期我们将主机时钟同步算法改进了 10 倍!默认情况下,OAK相机(PoE款和 USB款)将时钟(时间戳)与主机同步,时间戳被添加到所有 OAK 消息中(帧、深度图、IMU 数据包等),因此与主机更好地同步时间戳将得到改善:
- VIO/SLAM性能提升:与主机连接的设备(如 IMU)更好地同步 OAK 数据,意味着VIO算法将表现得更好。
- 多相机同步:当你将多个相机连接到同一台主机时,可以根据时间戳同步帧。
- 与连接到同一主机的其他传感器同步,例如激光雷达、热像仪、GPS/GNSS、线/激光传感器、热传感器等。
更多信息可参阅此处。你可以使用最新版本的 2.24 DepthAI来获得此改进。
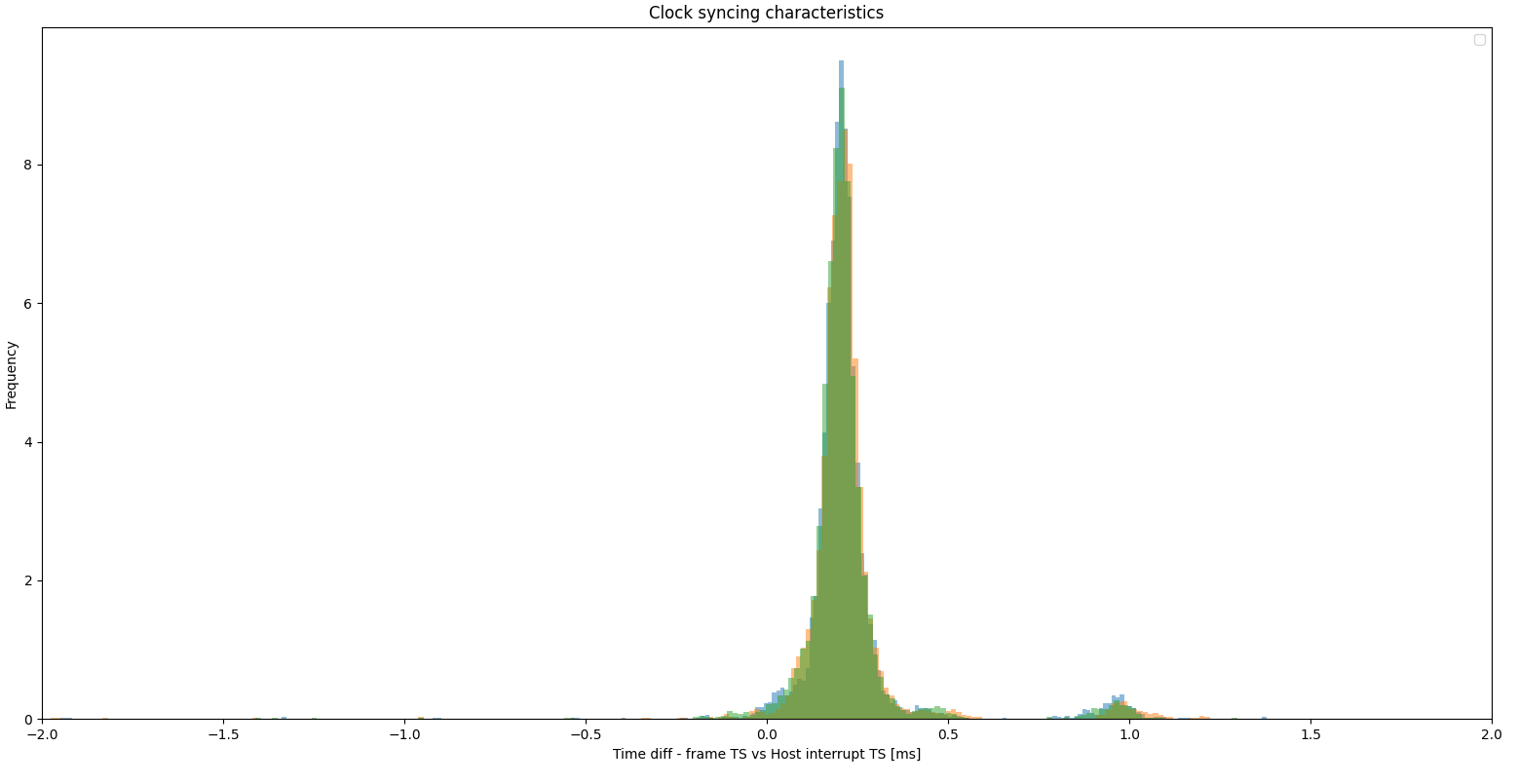
同步精度
PoE相机的设备时钟同步精度低于 500μs,USB相机的设备时钟同步精度低于 200μs,与主机时钟的偏差为 1σ(标准差)。下面的直方图显示了主机时钟和 OAK PoE 设备时钟之间的时间差: