实跑 YOLO V11在 OAK内部运行的效果
哈喽,各位OAK中国的朋友们!
今天,我想给大家演示一下最新发布的Yolo V11神经网络
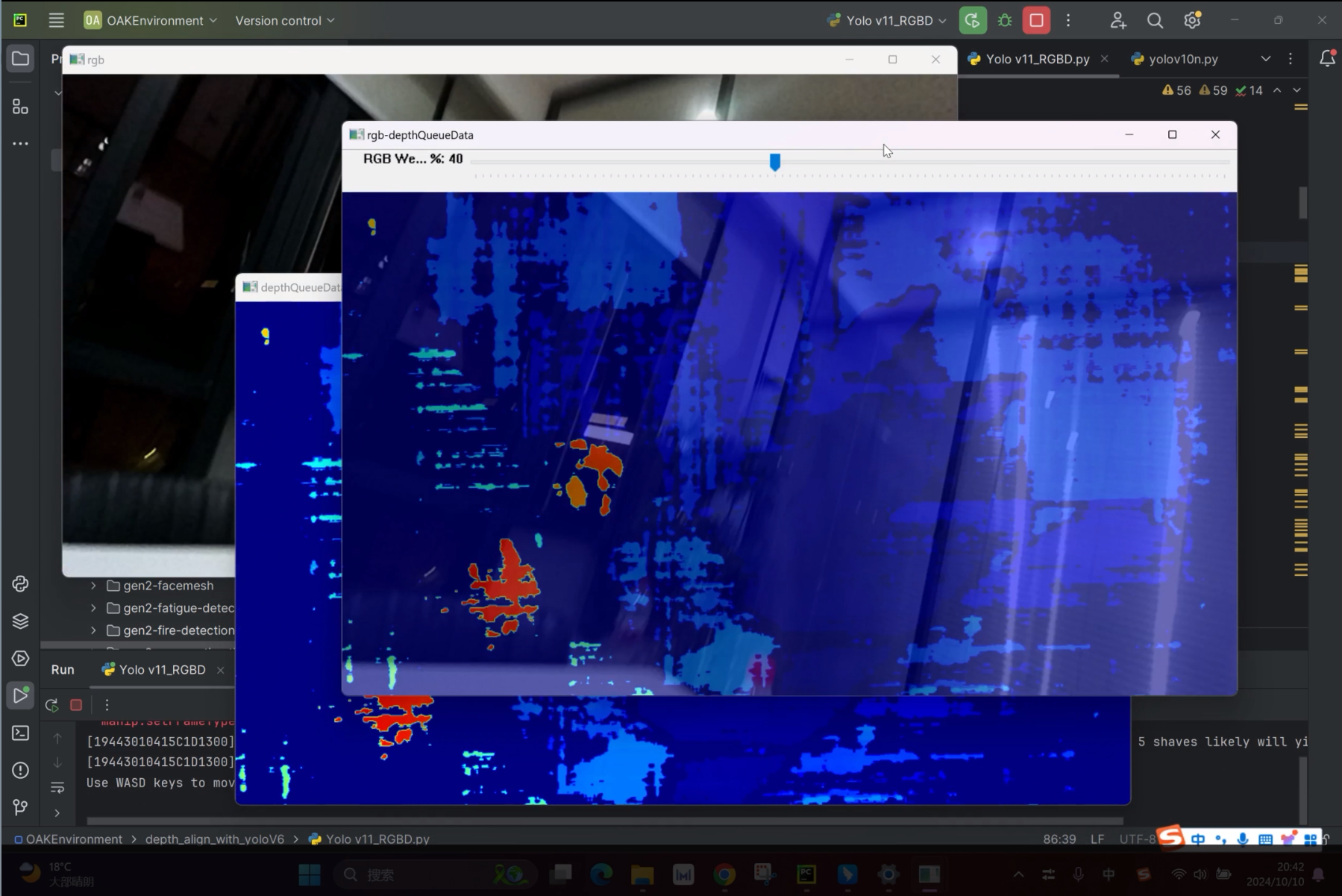
下面我将演示的一个程序是:同时在我们的OAK相机上跑Yolo V11和RGB-D,也就是彩色相机和深度图的一个叠加的一个效果
RGB-D和Yolo V11都是跑在我们的相机里面的并且相机的内部做了一个畸变校正以后的深度图,然后在叠加的图上产生一个Yolo V11检测和识别的效果
现在是跑30帧,1920*1080的这样的一个分辨率
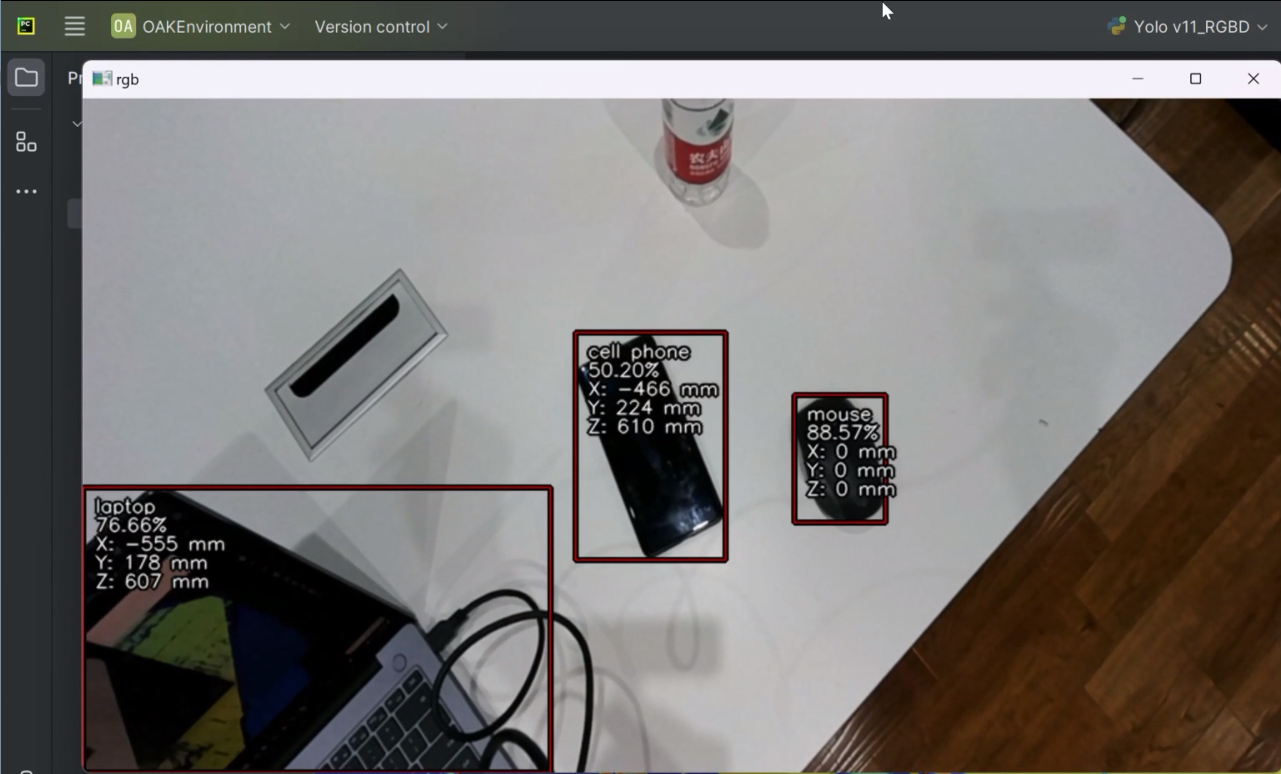
这个是我们的彩色图
大家可以看到Yolo V11识别的一个效果
优点:
我经过和Yolo V8和V9对比以后
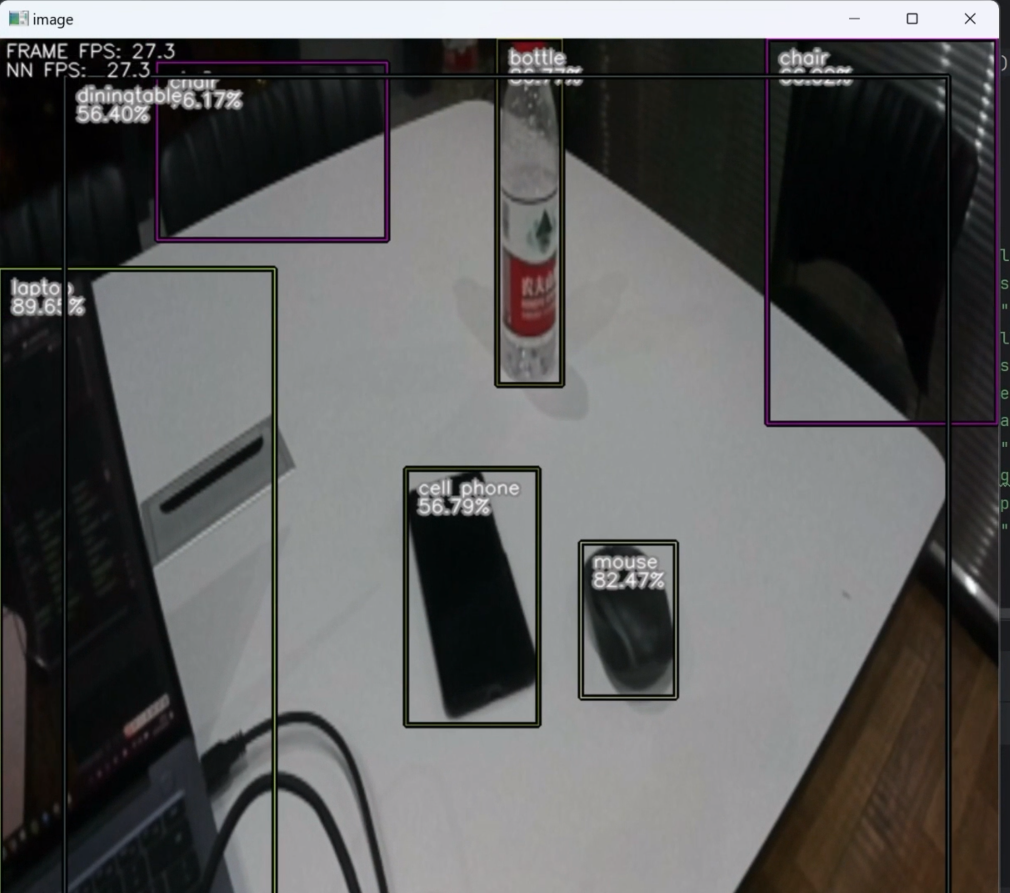
发现Yolo V11识别的东西:识别框更稳定,并且识别的东西更准
可以识别到我的手机和我的鼠标
同时可以叠加一个深度图,深度图可以跟RGB图进行一个对齐
这是一个bottle深度图
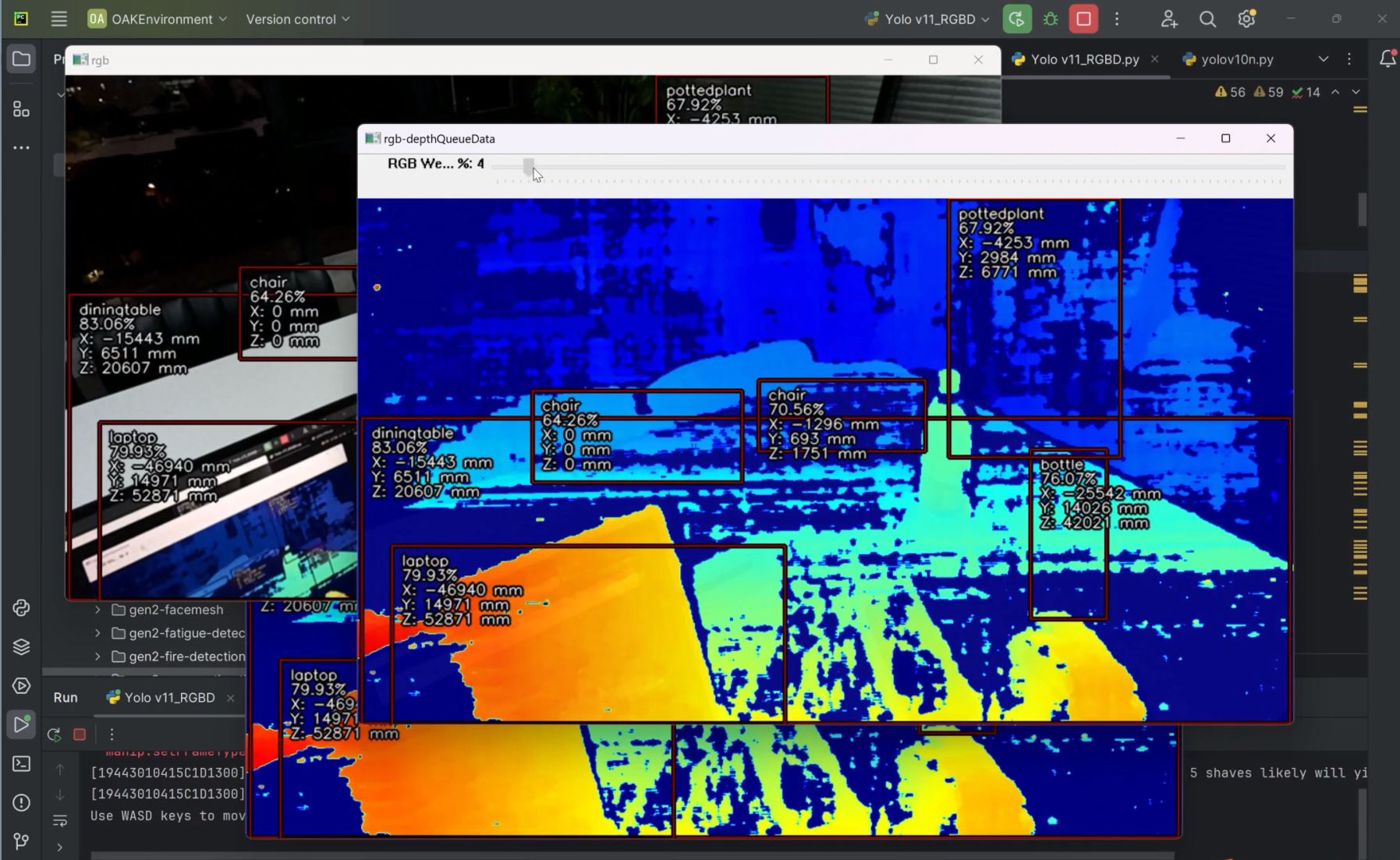
一个深度图上的框产生X Y Z 3个坐标
然后同时我可以把它变成彩色图
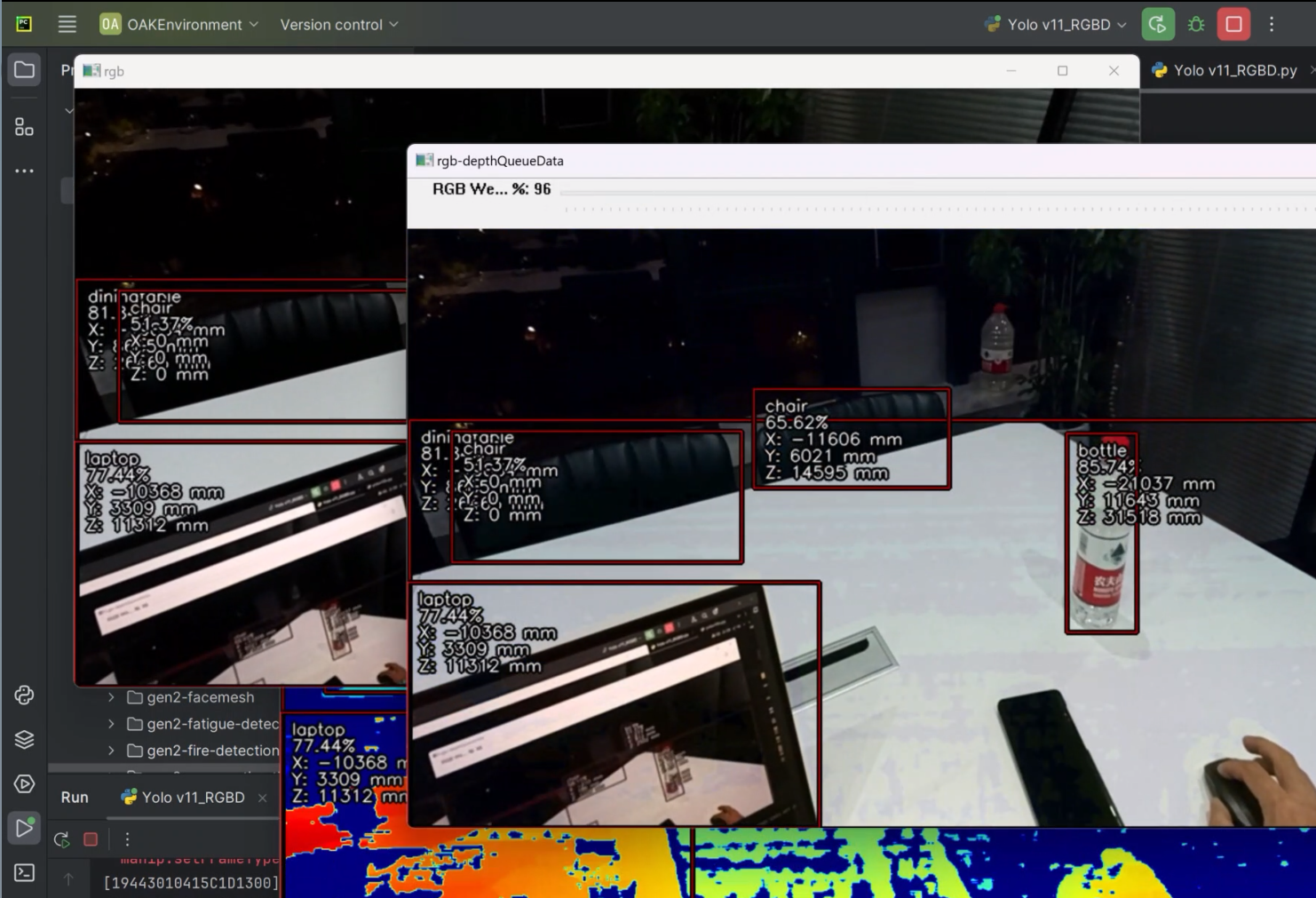
这所有的识别工作以及RGB-D的生成工作都是在相机里面完成的
相机优势:
OAK它的优势就是在一个神经网络方面的一个超强的兼容性
以及对新的神经网络架构的一个适应性。(能够比较简单快速的把Yolo系列的神经网络模型
以及其他的一些比较新的神经网络模型可以部署在我们的OAK相机里面并且同时跑RGB-D)
之前我也演示过:运行Yolo V10 V9 V8 V6V5 都是可以在我们的OAK相机里面去运行的。
包括之前的V8的一个人体姿态检测的模型的模型和V11的分割的模型一直到今天出的Yolo V11,也都可以在我们的相机里面比较流畅的运行
好
下面会给大家看一下Yolo V11模型在OAK的内部做加速的时候的运行的一个速率
Yolo V11运行在我们OAK的相机里面换成自己的路径就可以,其他的代码和Yolo V8 V9 V10基本上是一样的,什么配置也不用做
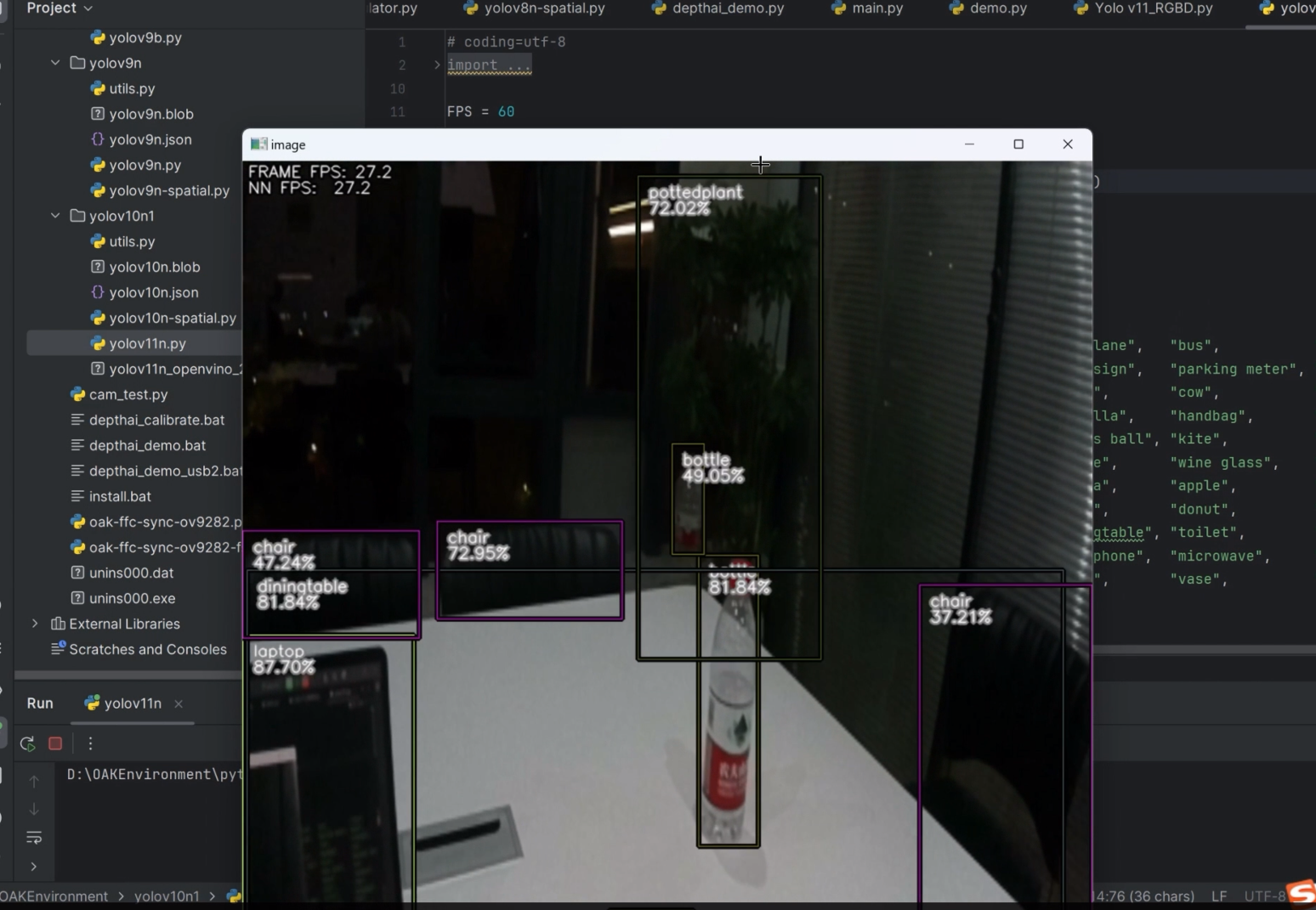
大家可以看到Yolo V11可以稳定的运行在27帧左右
识别这个手机、椅子、后面的植物、桌子、电视机、它也都能识别
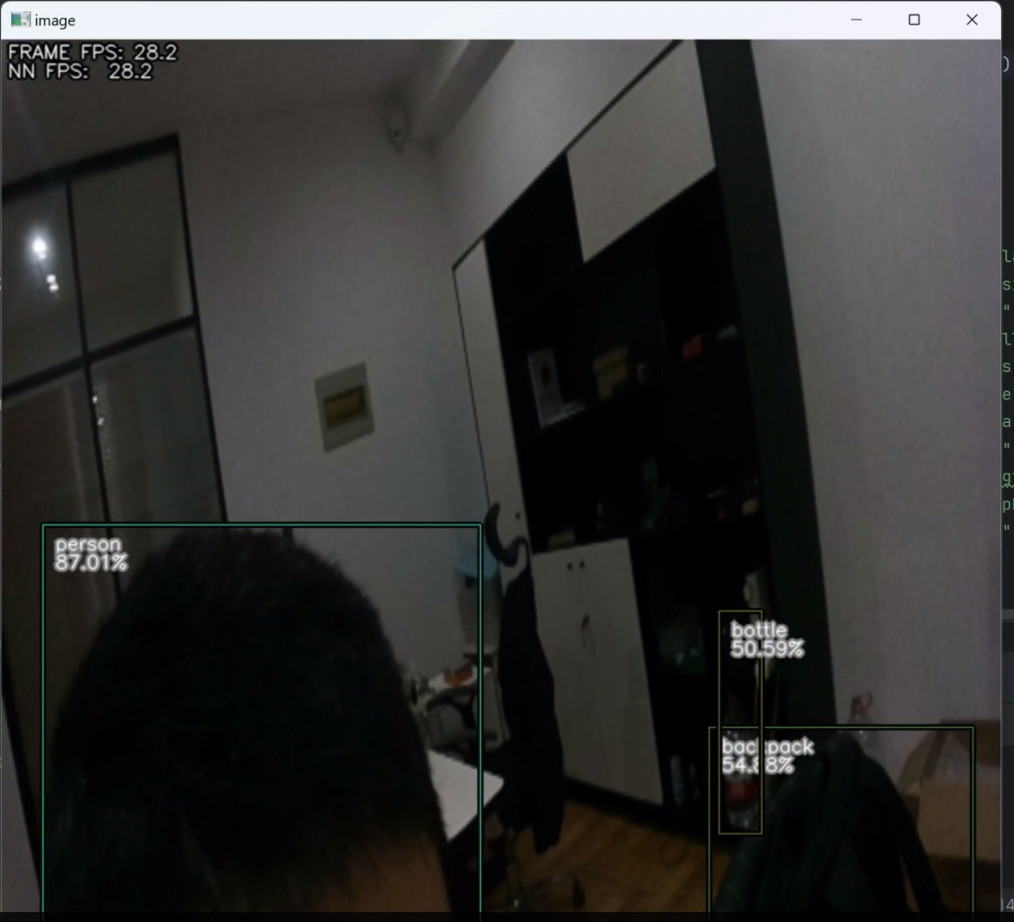
哪怕露一点头,也能识别到人
好今天我的介绍就到这里
谢谢大家