OAK新品评测,四相机+IMU在ros中的硬件同步
安装依赖
sudo wget -qO- https://raw.githubusercontent.com/luxonis/depthai-ros/main/install_dependencies.sh | sudo bash
sudo apt install python3-rosdep
sudo rosdep init
rosdep update
编译程序
mkdir -p dai_ws/src
cd dai_ws/src
# 解压示例源码包
unzip ros1_oak_ffc_sync.zip
cd ..
rosdep install --from-paths src --ignore-src -r -y
catkin_make_isolated执行程序
source devel_isolated/setup.bashroslaunch
ros1_oak_ffc_sync oak_ffc_sync.launchRviz配置
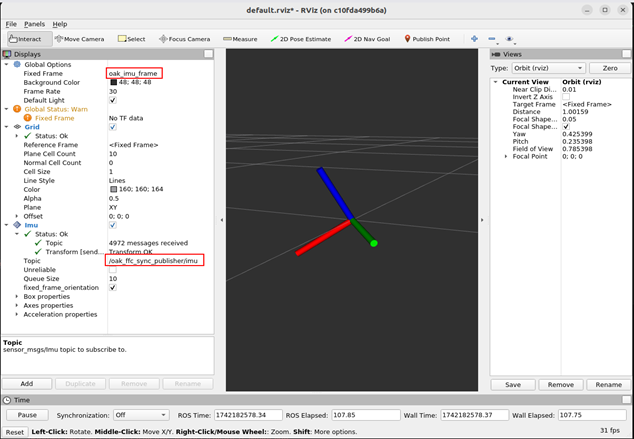
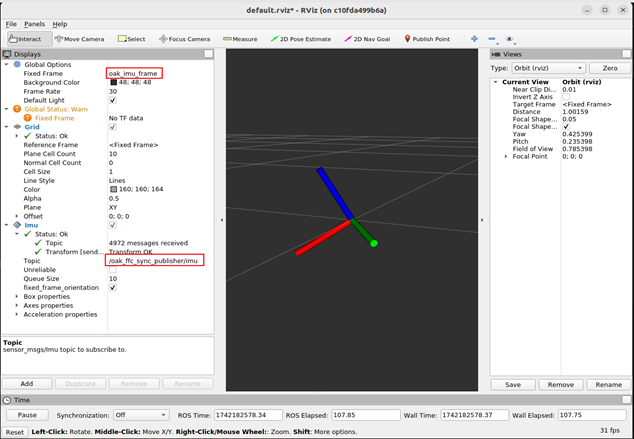
- 配置IMU节点
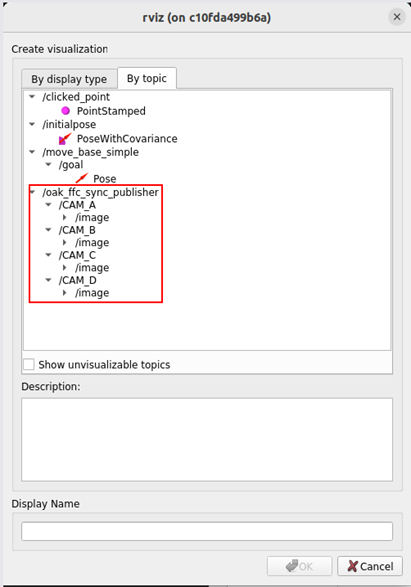
- 配置Image节点