【第一视角】无GPU挑战跨楼层建图:一部相机搞定高精度、高鲁棒性的AI-slam建图
在这篇博文中,我们评估了适用于 OAK-D-W 的 VIO/SLAM 的因子感知 SDK。
这里有一个将购物中心映射到3D空间的快速演示:【第一视角】无GPU挑战跨楼层建图:一部相机搞定高精度、高鲁棒性的AI-slam建图_哔哩哔哩_bilibili
Factor Perception SDK
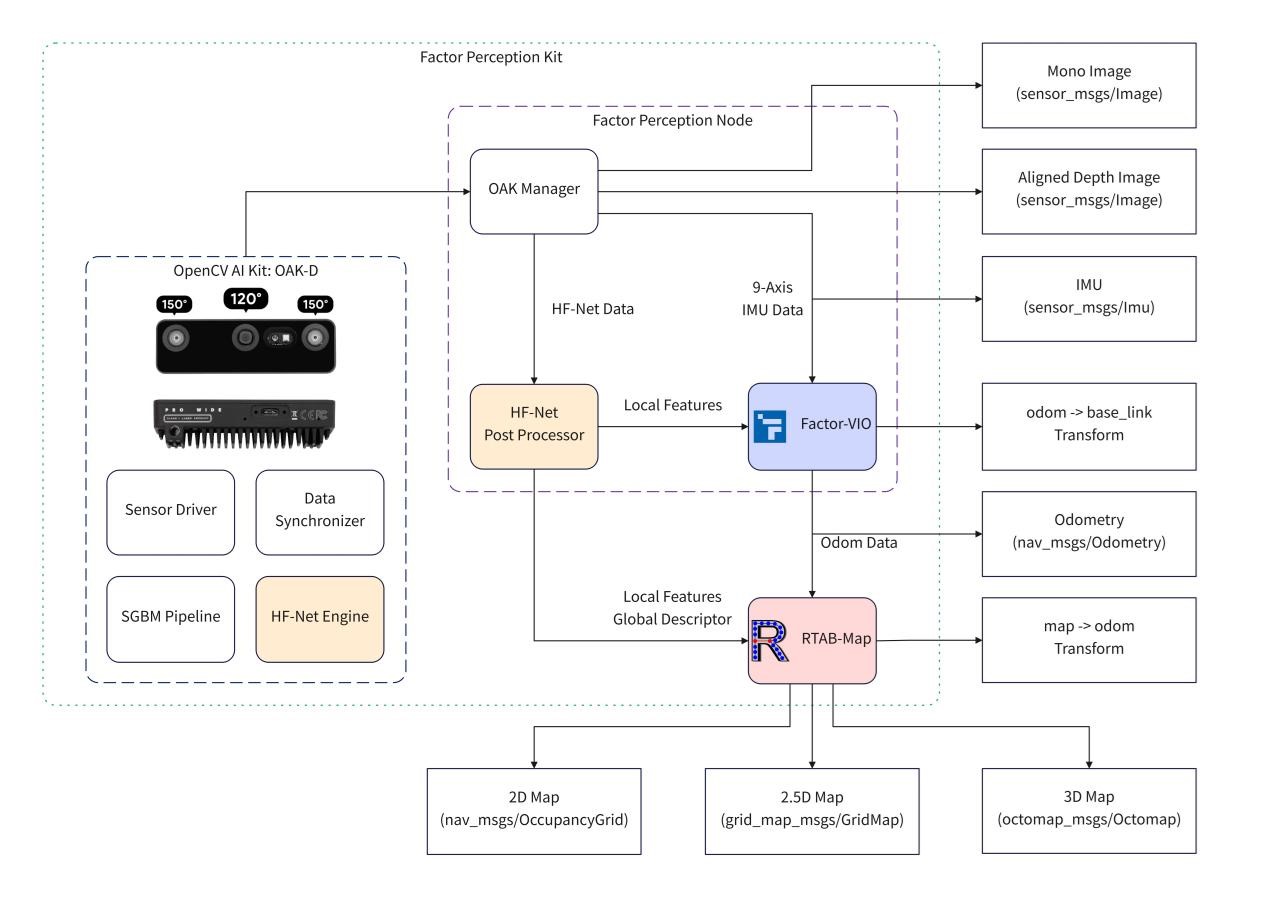
Factor Perception SDK 是一个第三方SDK(非OAK开发的),下面是其架构的示意图。它使用RTAB-Map进行SLAM,并使用HF-Net NN模型在边缘高效运行VIO。我们的评估是在SDK的1.1版本上进行的。
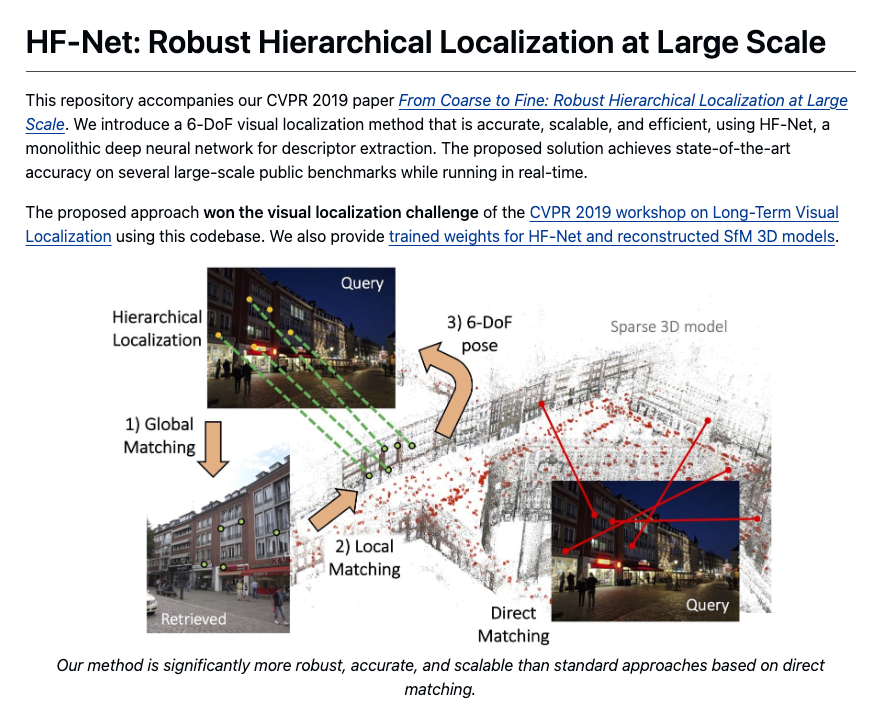
HF-Net
Factor Perception SDK在设备上运行 HF-Net NN 模型(论文的存储库,depthai-hf-net demo),这有助于将计算工作负载从主机计算机转移到相机。
Evaluation results
我们注意到, X/Y 漂移很小,但在商场视频中存在一些 Z 漂移,约为 1 米。如果只在平坦区域(例如仓库,而不是多楼层)操作,或者使用图像优化,可以通过在 SLAM 算法中添加 Z轴漂移约束来解决这个问题。