ToF 传感器更新
我们最近改进了 ToF 解码管道(固件)和 ToF 工厂校准,该校准已应用于我们最新的带有 ToF 相机的OAK-D-SR-PoE
1. 点云
这是直接来自摄像机的原始点云(没有应用任何后处理过滤器)。
https://www.bilibili.com/video/BV1SpsheREbM/?spm_id_from=333.999.0.0 (复制到B站查看视频)
2. ToF 精度
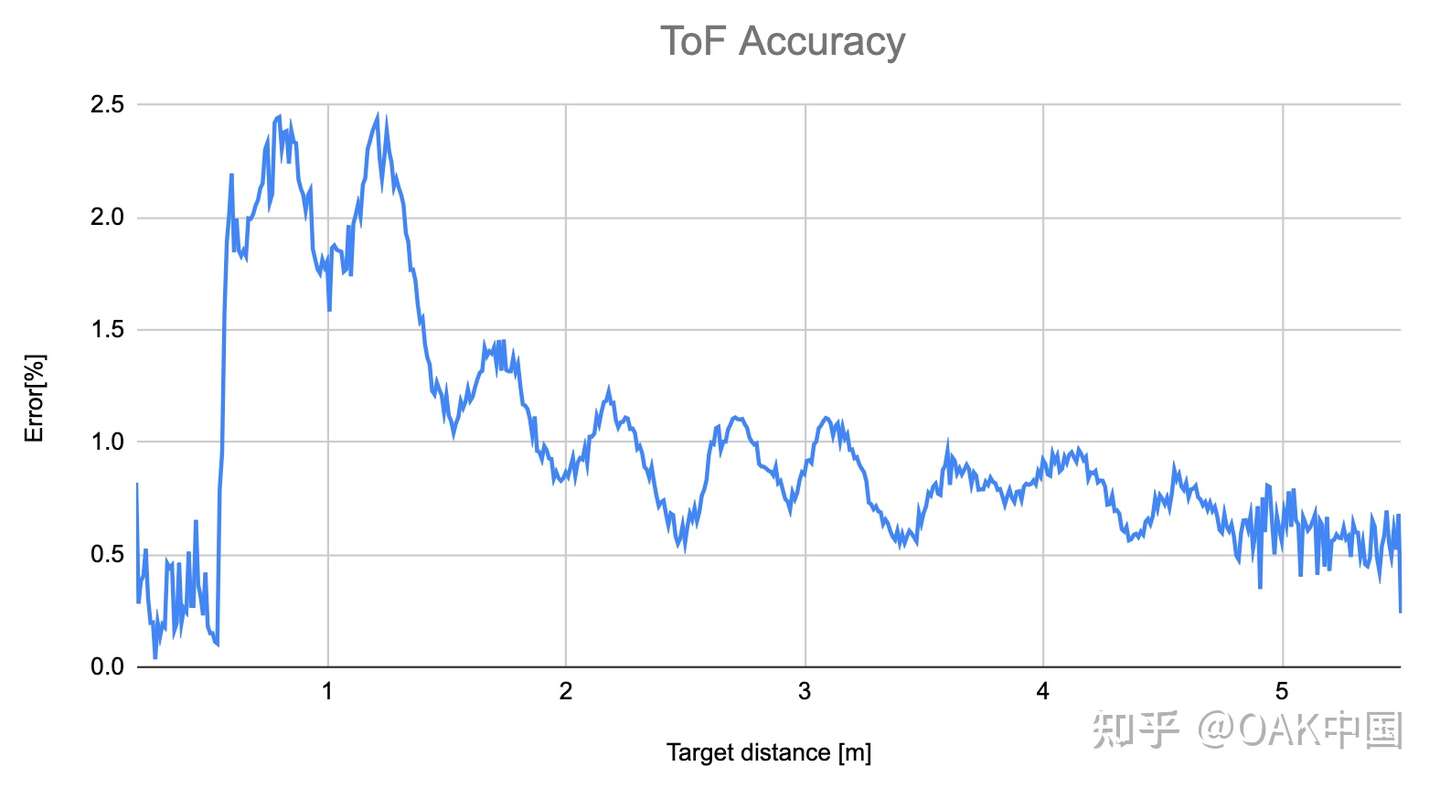
(ToF 深度误差图,在工厂校准的 OAK-D-SR-POE 相机上测量)
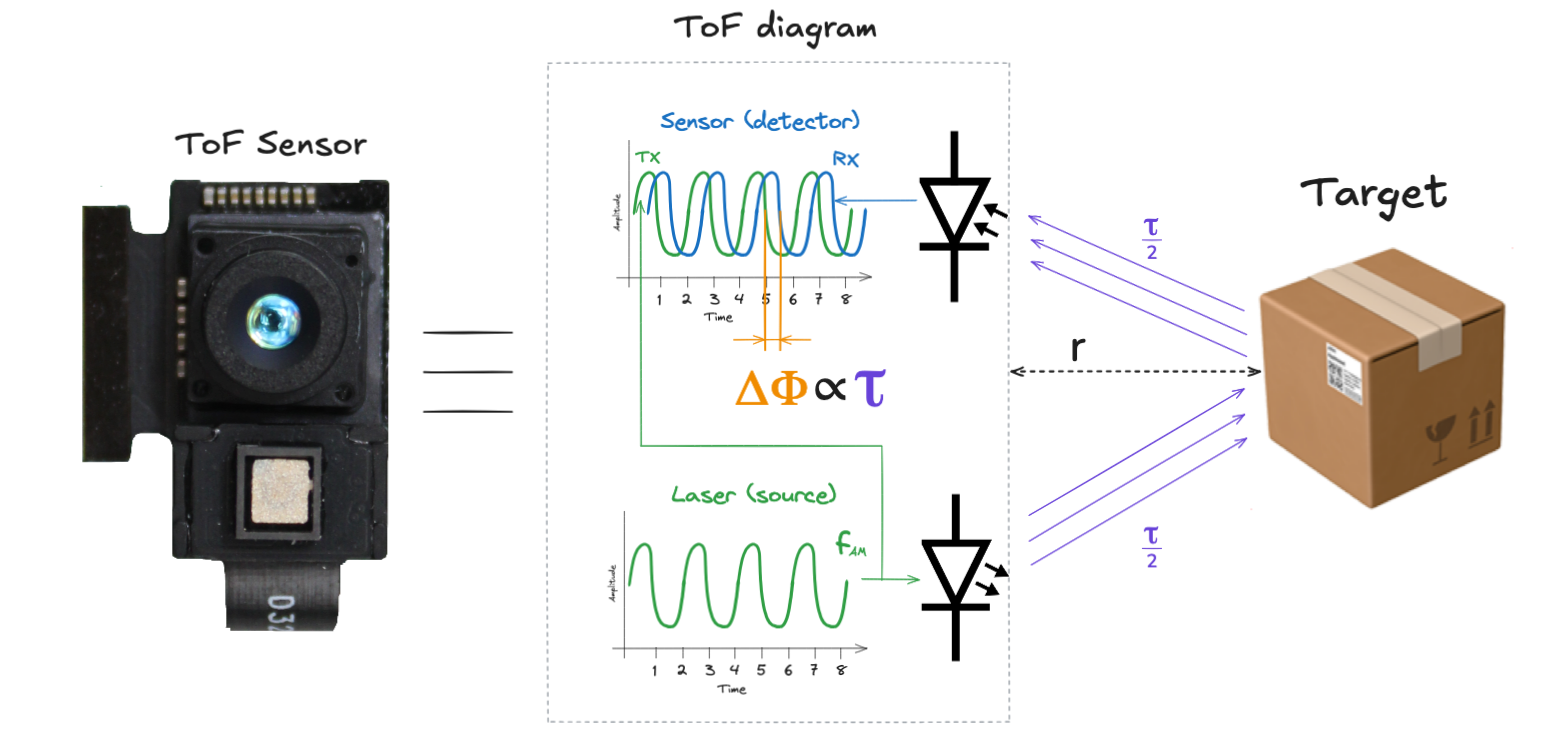
3. 关于 iToF 系统
间接飞行时间 (iTOF) 是一种测量技术,用于通过发射传播到物体然后返回传感器的红外光波来确定传感器之间的距离。 传统的 TOF 直接测量信号传播到物体并返回所需的时间,而 iTOF 则通过分析反射信号的强度或幅度调制来间接估计距离。
当信号传播到对象并返回时,它会发生强度或振幅的变化。这些变化是由多种因素引起的,包括对象的表面属性、距离和环境条件。传感器分析反射信号的调制模式,以提取有关到物体的距离的信息。通过将调制特性与已知参数和校准数据相关联,iTOF 系统计算传感器与物体之间的距离。
到目标的距离与给定调制频率的相移 (ΔΦ) 成正比,在本例中为 80MHz 或 100MHz。
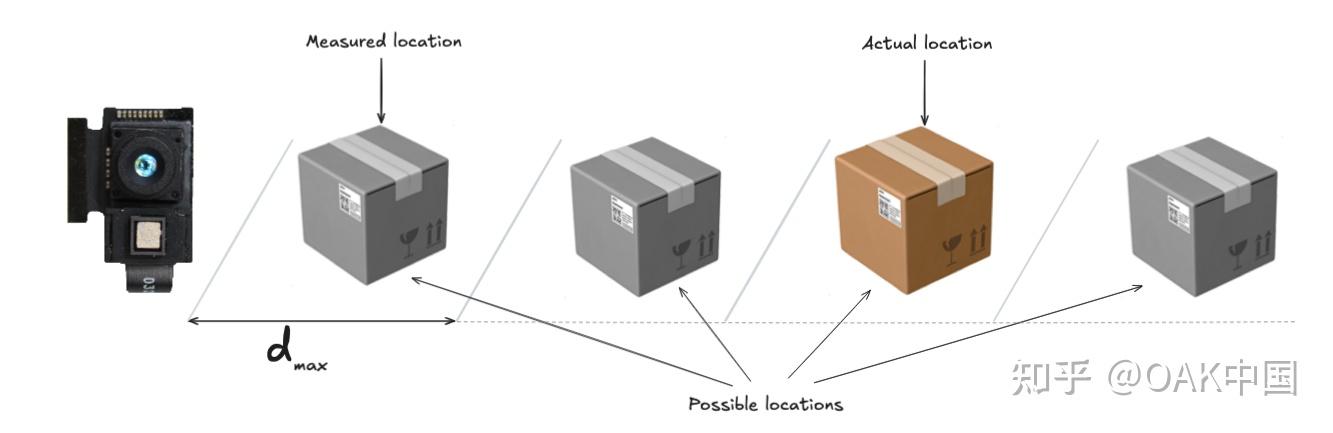
4. 相位展开
在 iTOF 系统中,由于使用了调制频率,准确测量较长的距离可能是一项挑战。
我们使用的 ToF 系统支持 80 MHz 和 100 MHz 的调制频率,这意味着可以测量的最大距离分别为 1.875 米和 1.5 米。 例如,如果目标距离 2.8 米,则仅使用 100 MHz 调制频率的系统将无法区分目标是在 1.3 米、2.8 米、4.2 米还是更远的地方,因为它只能检测相移,而不能检测确切距离
在 iToF 系统中同时使用调制频率(80 MHz 和 100 MHz)有助于将最大可测量距离单独扩展到每个频率的限制之外。该技术利用多频相位展开的原理来解决距离模糊问题。
5. 噪音和错误
为了最大限度地减少噪声和误差,每个 ToF 传感器都在工厂校准期间进行了校准。我们最近改进了这种校准,因此它可以补偿 ToF 系统中存在的不同误差。
5.1固定相位模式噪声 (FPPN)
这种类型的噪声是由于 TOF 传感器组件的缺陷或不一致或环境因素而发生的。这些缺陷可以看作是相位测量中的系统误差。在校准过程中,系统测量不存在物体时的相移(背景相位)并计算要使用的校正。每台摄像机都有不同的 FPPN 校正,这意味着每台摄像机都需要单独校准以进行补偿。如果没有这种补偿,深度输出就不具备任何用处的必要质量。
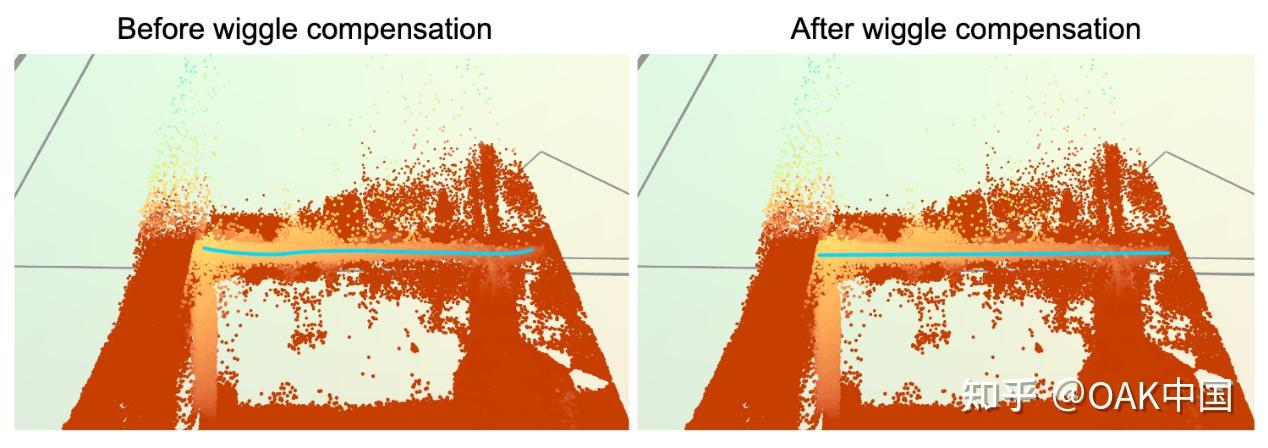
5.2谐波混叠 (Wiggle Error)
摆动错误是使用相位展开的结果。理想情况下,发射的信号是完美的正弦波,但在实践中,我们使用方波。当使用方波时,产生的互相关呈三角形,并且此三角波形会引入更高的频率,这可能会使初级谐波信号混叠或失真。这种混叠的结果是测量距离出现 “摆动” 或非线性。
在实践中,此错误会使直曲面看起来“摆动”。有关说明,请参见以下图片,该图片取自原始深度图,显示了桌子的侧视图。有时,人眼很难看到这种误差,但其校正是提高 ToF 相机测量质量的关键功能。