机器人无人机视觉避障有哪些方式?

目前,市面上主流的小型无人机避障系统主流的有这几种,超声波、毫米波雷达避障、激光雷达避障、TOF光或者结构光测距避障等,以及非常有望成为主流的OAK智能双目系列相机的视觉避障。
OAK双目人工智能相机是OpenCV官方指定的双目深度视觉+人工智能开发套件。内置了双目深度测量计算,OpenCV图像处理,4TOPS算力神经网络推理加速等功能。OAK所有系列相机中,OAK-D-Pro和OAK-D-Lite重量轻、功耗低,是无人机双目视觉避障的一款利器。其中Pro是双目+结构光混合测距、精度高,内置IMU,还有红外功能,是目前最受用户欢迎的一款深度相机。


以下分析一下各种避障的优缺点:
1.超声波、毫米波雷达测距
优点:
- 技术相对成熟、安装集成实现简单、白天黑夜全天候使用
缺点:
- 晃动的树叶、草地、海绵避障效果不佳
- 多台无人机集群飞行时易受到相互干扰
- 无人机在遇到障碍物时往往只能在其前方保持悬停,仍然需要人工介入根据具体情况进行遥控接管。
2.激光雷达测距
优点:
- 探测相对距离远,精度高,白天黑夜全天候使用
缺点:
- 需要漫反射物体才能检测,镜面物体测距效果不好
- 不能在太阳光的主要能量波段工作,会相互干扰
- 单线激光传感器,只能给出一个平面距离值。三维激光雷达体积大,价格昂贵,故不太适用于无人机
3.TOF光或者结构光测距
优点:
- 类似阵面发射的多点激光,弥补单线雷达的不足,可以探测三维环境
- 探测精度高,深度图精准
缺点:
- 目前主流的tof传感器探测量程比较短,只有2~6米以内
- 室外使用容易受到环境光干扰
4.双目视觉测距(以OAK-D-Lite智能相机为例)
优点:
- 结构简单、硬件系统简单、工作可靠性高
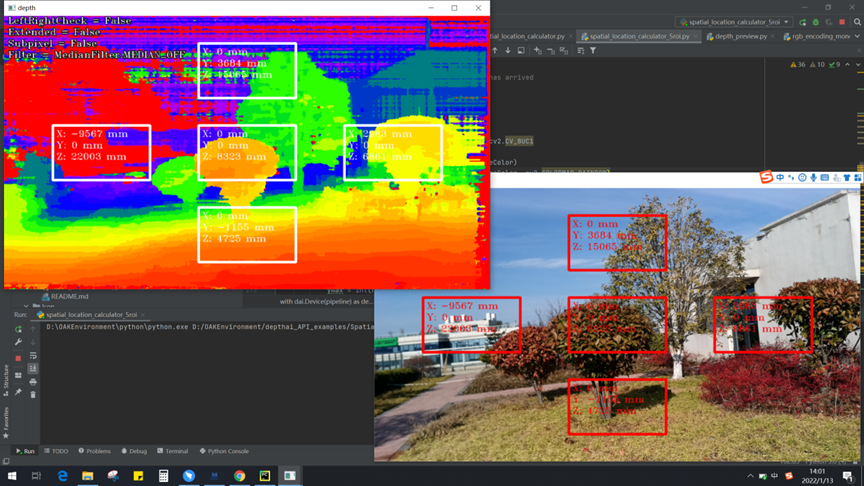
- 内置深度计算芯片、直接同步输出高分辨率深度图和RGB图,让避障功能有了更多的发展空间,比如避障之后的智能飞行、路径规划、VIO、SLAM等
- 功耗低、体积小、深度图和视觉神经网络识别结果可以融合
- 室外太阳光下效果影响不大,夜间加补光可以正常工作
- 深度探测量程可以到30米,满足速度较快的无人机需求
- 200fps的高速全局快门深度相机,计算延时非常低
缺点:
- 无纹理的环境效果不好
- 探测精度只能到厘米级别,不如激光和tof等传感器的精度
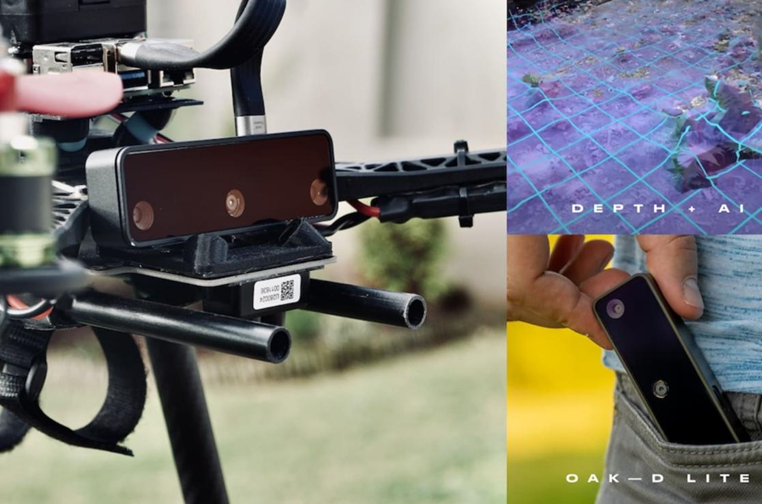
除了热门的USB款OAK-D-Pro外,还有它的广角版本、PoE接口版本(工业级别防护)等,以满足用户不同场景下的需求。


