





OAK-D-SR
OAK-D-SR
SR(Short Range)款是专门针对近距离测距推出的新品。OAK-D-SR与标准版的OAK-D相比,提高了近距离测距精度,是目前1m内测距精度最好的产品。产品测试详情>>
Description
产品介绍
OAK是OpenCV官方指定的深度视觉+人工智能开发套件。了解更多>>
OAK-D-SR这款相机非常适合需要近距离深度和细节的应用,如质量控制、自动化制造、机器人、机械臂分拣等。OAK-D-SR利用了OAK-SoM-Pro来实现紧凑的整体设计,SoM的使用缩小了整体设计的尺寸,使其更容易安装或适合各种机器人工艺。该设计也是开源的,允许进行所有必要的修改。
RVC2 AI芯片组
RVC2简介
RVC2是第二代应用于OAK 3D AI相机的AI芯片组,第二代的OAK设备均内置预搭载RVC2 AI芯片组。RVC2主要由两个预封装组件组成:
- 针对特定SOC进行微调的DepthAI功能;
- 极低功耗的高性能SoC及其所有支持电路设计(包含高性能散热模组、PCB等)
RVC2性能
- 4T边缘算力(1.4T可用于AI)
- 支持多种AI 模型,甚至内置自定义架构AI模型(需转换)
- 编码:H.264,H.265,MJPEG – 4K/30FPS, 1080P/60FPS
- 机器视觉:通过ImageManip节点进行畸变/去畸变、重构大小、裁剪、边缘检测、特征追踪、甚至运行自定义的CV 函数;
- 目标检测与追踪:内嵌节点完成2D 与 3D追踪;
- 低功耗高算力的AI加速推理,兼容几乎所有主流神经网络边缘端加速;
- 板载边缘AI:实时的高性能3D 检测、特征追踪、OCR、AI识别、边缘检测、骨骼模型检测、语义分割等;
- 支持的语言和平台:Windows10、Ubuntu、树莓派、linux、macOS、Jetson、Python、C++、ROS、Android等(需depthai≥V2.16.0);
- 支持的框架和神经网络:OpenVINO、Kaldi、Caffe、ONNX、MXNe、TensorFlow、Pytorch、MobileNetv2SSD、Deeplabv3+、YOLOv3及以上等;
RVC2功耗
RVC2芯片组自身最大功耗大约4.5W,主要由集成到RVC2的SOC和芯片自身占用;
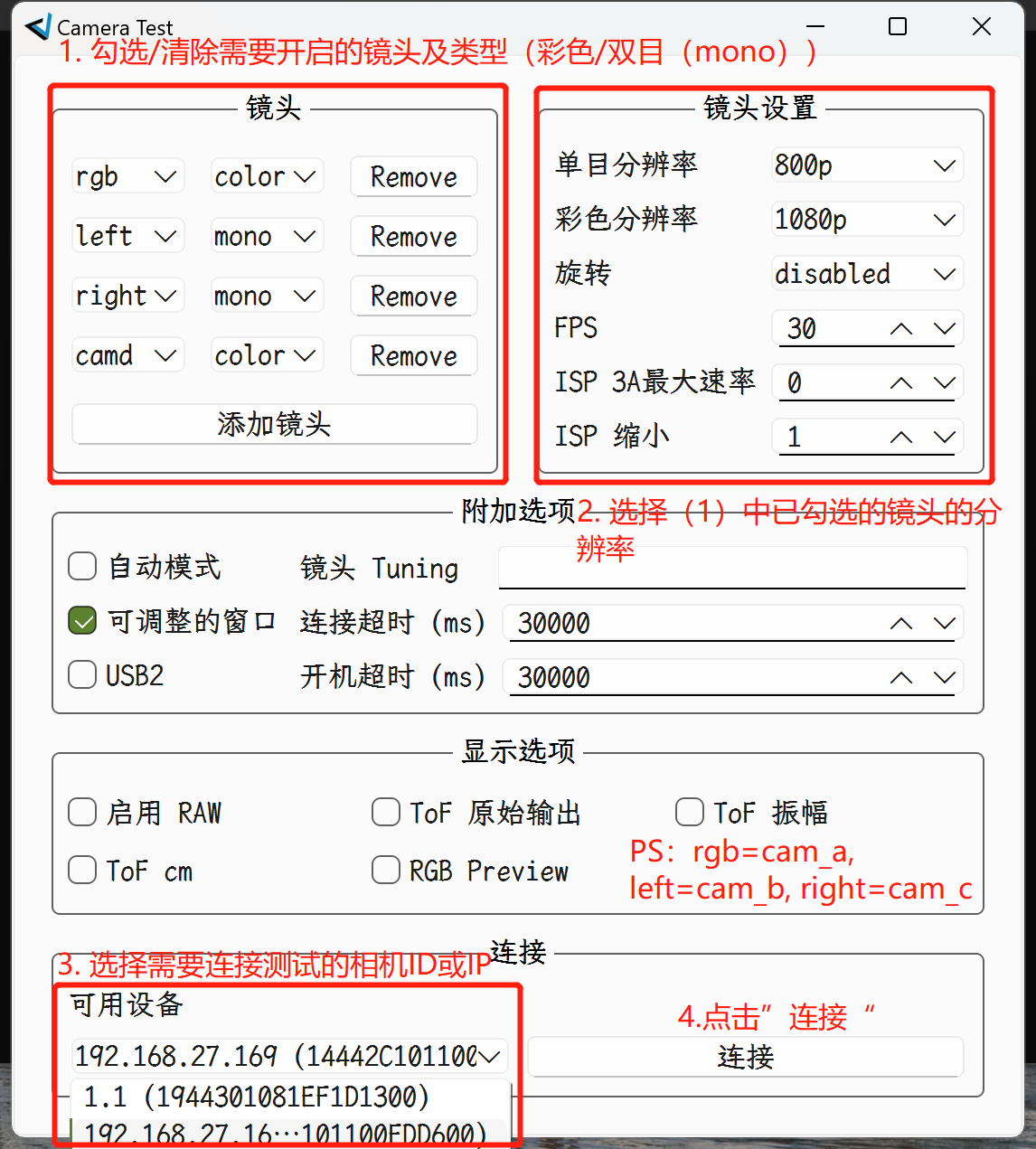
CAM_TEST硬件检测小程序
获取地址:CAM_TEST.EXE
支持型号:所有机型(除ToF外)
使用说明:
- 选择相机镜头(支持多个同时启动)和镜头属性(mono一般指代双目)
- 为所选的镜头设定分辨率
- 检查所选的相机IP或ID
- 点击“连接”
应用场景
- 工业智能化/自动化
- 机器人、无人机
- 安防监控
- 智能驾驶
- 医疗大健康
- 编程教育







包装内容
- 一台OAK-D-SR相机
- 一根1米Type-C线(OAK-D-SR-EA没有线)
技术参数
镜头参数
| 参数 | 双目相机 |
|---|---|
| 图像传感器(Sensor) | OV9782 |
| DFOV / HFOV / VFOV | 89.5° / 80° / 55° |
| 分辨率 | 1MP (1280×800) |
| 最大帧率 | 120 FPS(800P) |
| 对焦范围 | FF:20cm – ∞ |
| 光圈 | 2.0 ±5% |
| 镜头尺寸 | 1/4” |
| EFL(有效焦距) | 2.35mm |
| 像素大小 | 3µm x 3µm |
| 快门 | 全局快门 |
产品特点
- 100万高像素全局快门双目OV9782相机
- 1米处精度误差2%
深度感知
- 双目深度传感器基线:2CM(即左右相机之间的距离)。最小和最大的深度感知取决于相机的FOV、分辨率和基线,更多信息请查看这里。
- 推荐测距范围:0.3~1m。最小深度(理论值):20cm(800P),最大深度(理论值):3m。参考误差:2%@1m。
其他参数
- 接口:USB3.1Gen1 (Type-C)
- 功耗:2.5W~3W
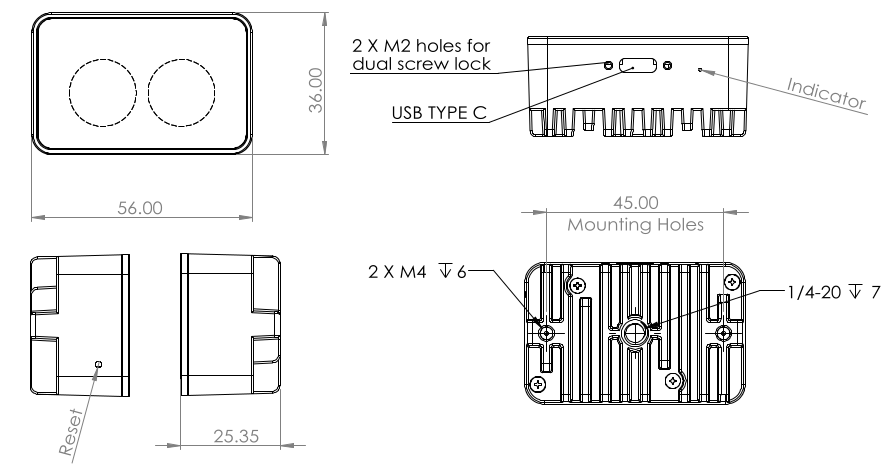
- 尺寸:56x36x25mm
- 重量:72g
- 工作温度:-20度~60度
- IMU:BMI270或BNO086




{kind=link}
{kind=link}